
Pour lire cet article en anglais, cliquez ici.

Au cours des dernières décennies, l’industrie laitière a conçu une multitude d’étables pour la traite robotisée, donnant lieu à des centaines de configurations différentes, étant toutes des variantes de deux modèles principaux : perpendiculaire et avec barrière d’accès.
Configuration perpendiculaire
Une configuration perpendiculaire place la chambre des robots entre les allées de raclettes, sur le sens de la longueur de l’étable, et le robot est parallèle à ces allées (Image 1). Dans cette configuration, plusieurs robots de traite peuvent être installés dans une même grande chambre, alignés bout-à-bout en rangée. Dans ce cas, la chambre des robots est habituellement située entre les allées de raclettes, soit dans le sens de la longueur ou de la largeur de l’étable (Image 2).
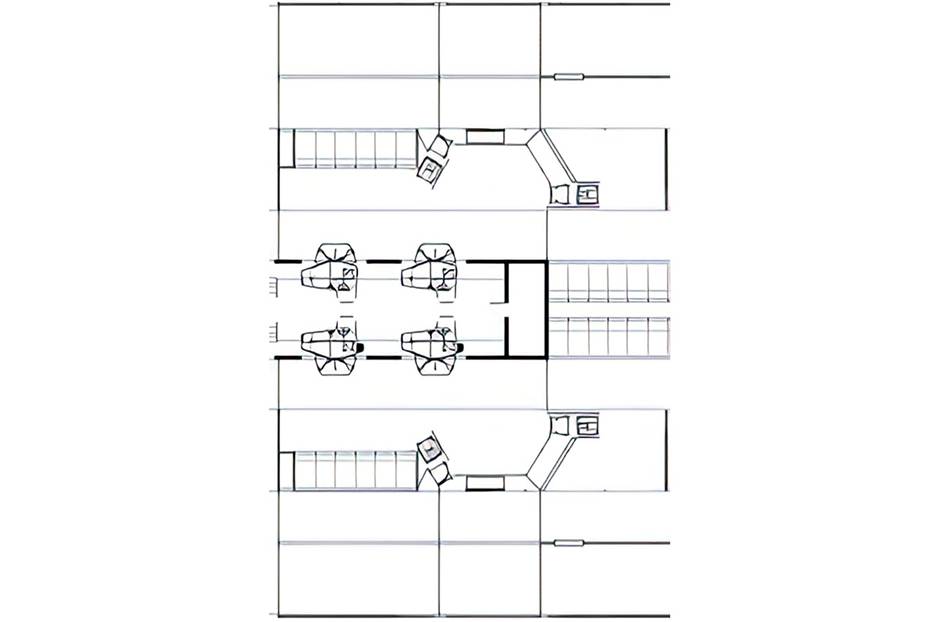
Une configuration perpendiculaire place la chambre des robots entre les allées de raclettes, sur le sens de la longueur de l’étable, et le robot est parallèle à ces allées. Image fournie par DeLaval.
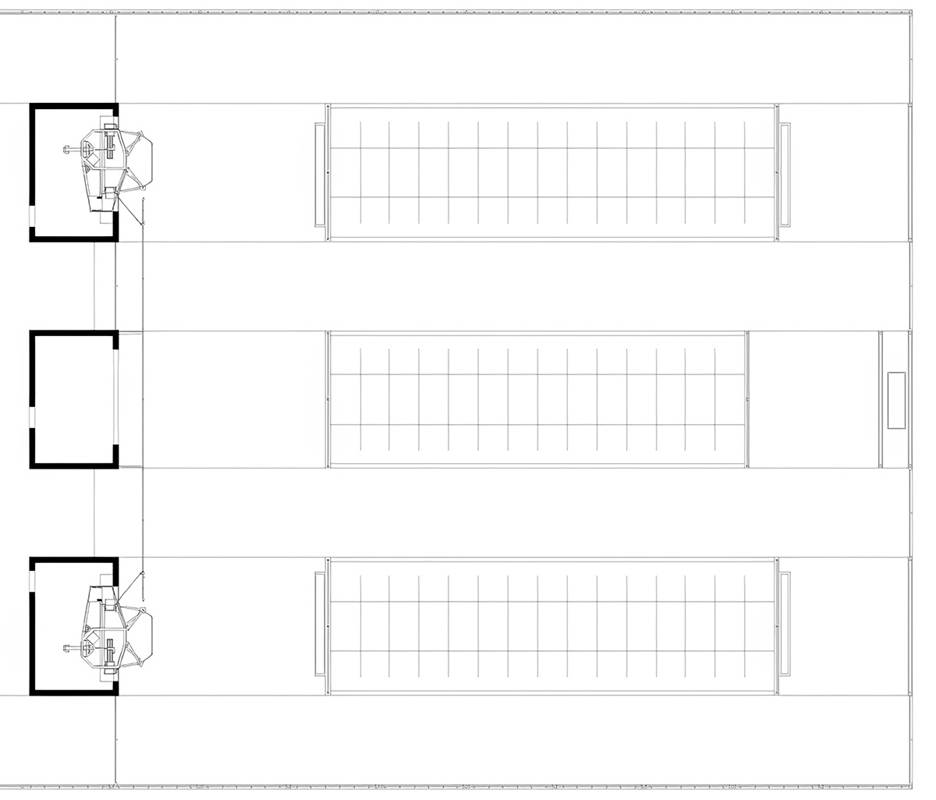
Dans le cas d’une configuration perpendiculaire, la chambre des robots est habituellement située entre les allées de raclettes, soit dans le sens de la longueur ou de la largeur de l’étable. Image fournie par DeLaval.
Barrière d’accès
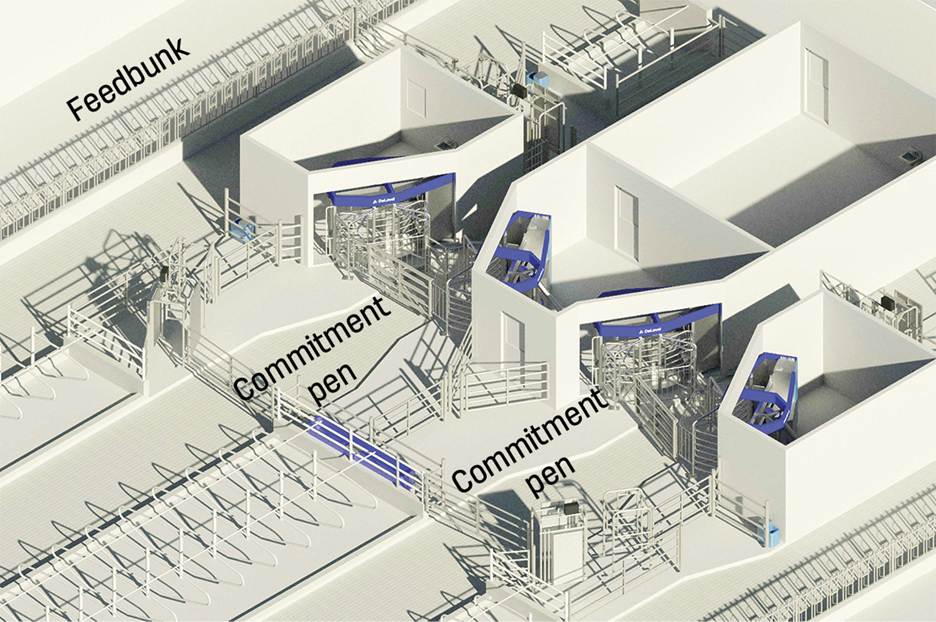
Une conception avec barrière d’accès place les robots de traite parallèles aux allées ou dans une configuration en rangée, ce qui les fait pivoter de 90 degrés par rapport à l’allée, avec un enclos d’engagement devant les chambres des robots (Image 3). Dans les deux cas, plusieurs chambres de robots sont nécessaires lorsque deux robots ou plus sont utilisés. Dans cette configuration, les vaches doivent passer par le robot de traite pour accéder à une autre partie de l’étable (Image 4).
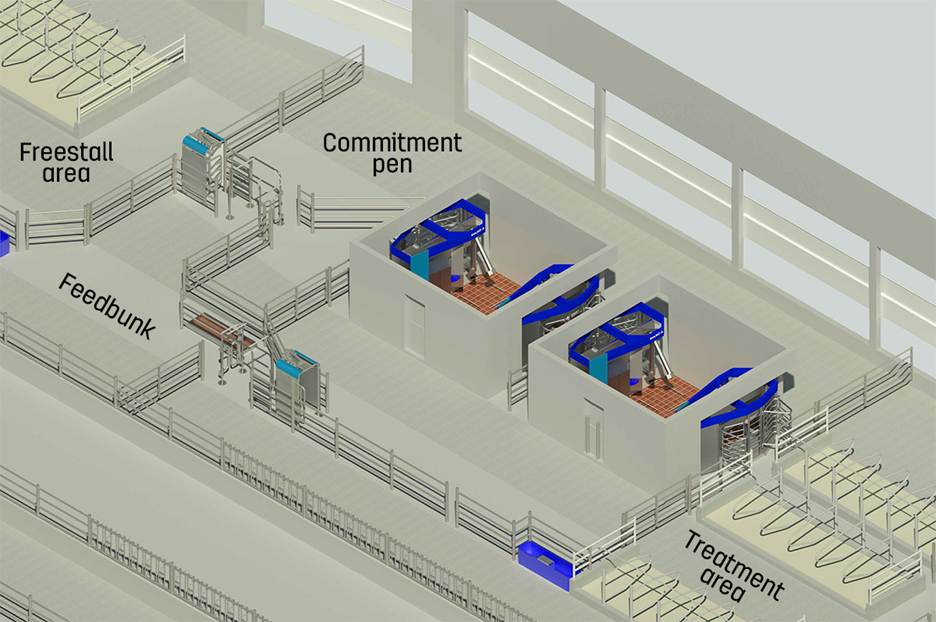
Une conception avec barrière d’accès place les robots de traite parallèles aux allées ou dans une configuration en rangée, ce qui les fait pivoter de 90 degrés par rapport à l’allée, avec une aire d’attente devant les chambres des robots. Image fournie par DeLaval.
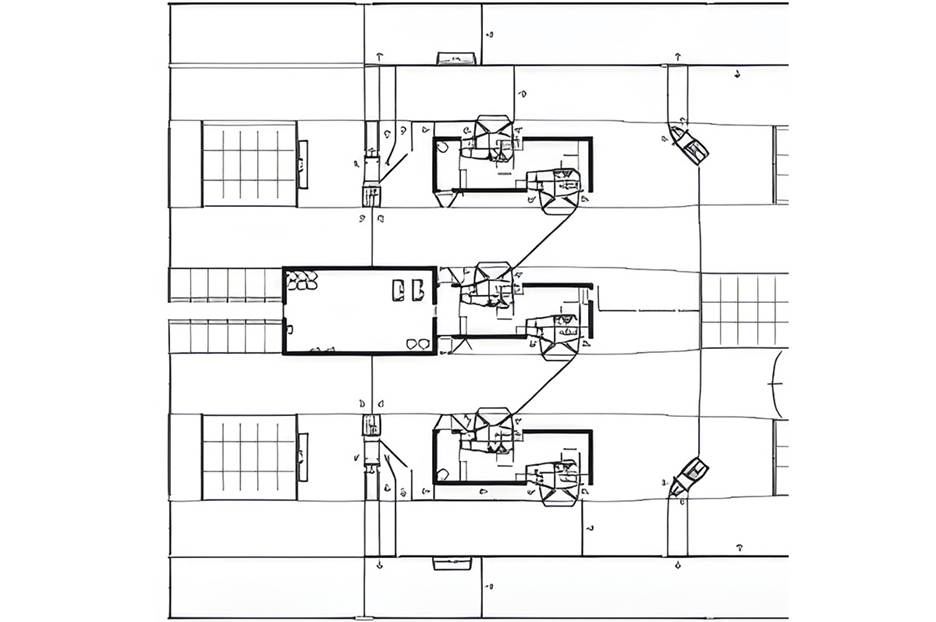
Dans cette configuration avec barrière d’accès, les vaches doivent passer par le robot de traite pour accéder à une autre partie de l’étable. Image fournie par DeLaval.
Les deux modèles, perpendiculaire et avec barrière d’accès, ont des sous-variantes avec des flux de vaches différents, mais la popularité du modèle avec barrière d’accès a élargi les possibilités de conception des étables robotisées.
Conception de l’étable et circulation des vaches
La circulation des vaches repose sur trois concepts de base : une circulation libre, une circulation guidée-modifiée et une circulation guidée. Ce choix est souvent à la fois le plus simple et le plus compliqué pour les producteurs laitiers, puisqu’il dépend de nombreux facteurs qui influencent la main-d'œuvre, les coûts opérationnels et les coûts de construction.
La circulation libre est exactement comme son nom l’indique : les vaches circulent librement dans l’étable, y compris vers le robot de traite. Ce concept peut nécessiter davantage de main-d'œuvre pour aller chercher les vaches à traire et pour les trier après la traite.
La circulation guidée-modifiée introduit une certaine orientation : les vaches sont libres de se déplacer, mais lorsqu’elles doivent être traites, elles doivent entrer dans une aire d’attente situé devant la chambre des robots, et être traites avant d’en sortir.
La circulation guidée exige que la vache suive un parcours défini à travers les différentes zones de l’étable. Par exemple, la vache peut passer de l’aire d’attente au robot de traite, puis à l’aire d’alimentation ou de traitement, ensuite à l’aire de repos avant de revenir à l’aire d’attente. Ces deux derniers modèles requièrent une disposition adéquate de barrières pour que la circulation des vaches se fasse tel que souhaité.
Pourquoi le modèle avec barrière d’accès?
Les deux modèles énumérés, avec barrière d’accès et perpendiculaire, peuvent convenir aux trois types de circulation, mais les circulations guidée-modifiée et guidée sont principalement utilisées avec la configuration avec barrière d’accès. Ce modèle tire profit du robot de traite, qui agit alors comme une porte de passage entre l’aire d’attente et la zone de tri.
Lors de la conception d’une nouvelle installation de traite robotisée, voici quelques avantages à considérer en lien avec le modèle avec barrière d’accès par rapport au perpendiculaire :
- Aucune cohabitation entre les vaches pré-traite et post-traite
- Facilité de tri des vaches grâce aux barrières
- Efficacité accrue pour le nettoyage et l’entretien de la zone des robots
- Réduction de la longueur des lignes à lait
- Possibilité de regrouper plusieurs robots (quatre ou plus) dans une configuration en rangée
- Facilité de gestion de l’aire d’attente
Il existe également des inconvénients en choisissant le modèle avec barrière d’accès :
- Nécessite des chambres de robots distinctes lorsqu’il y a plusieurs robots dans un même groupe
- Peut compliquer la tâche des techniciens de service en raison du nombre de chambres plus élevé
La conception avec barrière d’accès peut augmenter les coûts initiaux de construction en raison d’une étable plus longue et de multiples chambres à robots, mais ses avantages opérationnels peuvent compenser ces coûts à long terme.
Et après?
En 2006, une étable en Australie a installé des robots de traite combinés à une grande aire d’attente, créant l’un des premiers exemples de traite par lots, un concept qui marie la méthode conventionnelle à l’efficacité des robots. Avec ce type d’installation, l’aire d’attente est semblable à celle d’une salle de traite conventionnelle, tandis que les robots sont installés selon une configuration avec barrière d’accès, et la zone de tri post-traite est similaire à celle d'une ferme laitière conventionnelle (Image 5). Le concept a sommeillé pendant plus d’une décennie avant de refaire surface en 2020 aux Pays-Bas, avec huit robots de traite. Aujourd’hui, on compte plus d’une douzaine d’installations de traite par lots à travers le monde, à mesure que l’intérêt augmente pour ce type de traite automatisée.
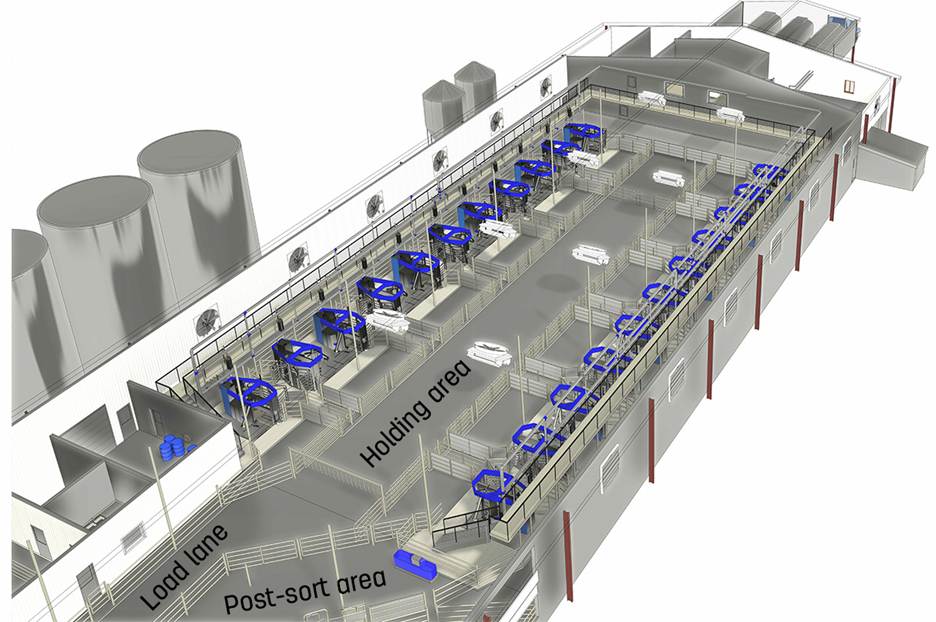
L’aire d’attente d’une configuration de traite par lots est semblable à celle d’une salle de traite conventionnelle, tandis que les robots sont installés selon une configuration avec barrière d’accès pour traire les vaches. Image fournie par DeLaval.
La popularité de la configuration avec barrière d’accès a permis de nombreuses variantes, notamment pour ses avantages en efficacité de la main-d’oeuvre. Le concept du avec barrière d’accès en rangée existe depuis environ dix ans, avec une première ferme à l’adopter qui se trouvait au Chili. Plus récemment, l’approche perpendiculaire a regagné en popularité en Amérique du Nord, particulièrement dans le Midwest, et un concessionnaire du Wisconsin a expérimenté une légère rotation des robots pour en faciliter l’accès (Image 6). Une douzaine d’étables utilisent actuellement cette configuration plus angulaire. Ces petites variations continuent de repousser les limites de la conception des étables robotisées.
Une légère rotation des robots de traite a été expérimentée afin d’en faciliter l’accès.
Image fournie par DeLaval.

